
 产品:66
产品:66


1. 如果希望ABB机器人定时输出信号,可以使用定时中断itimer,比如0.1s一次,中断里执行输出信号
2. 如果希望机器人定长距离输出信号,比如每10mm一次,不论机器人速度快慢,如何实现?
3. 可以通过ABB机器人的Trigger功能来实现。
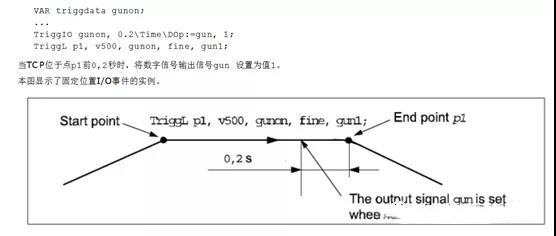
4. TriggIO gunon,0.2\Time\DOp:=gun,1表示距离终点前提早0.2s,将信号gun置为1
5. 如果从起点开始往后10mm输出信号,可以使用
TriggIO gunon,10\Start \DOp:=gun,1
6. 代码如下,使用triggdata数组。注:triggdata数组内元素不能超过25,否则执行时会报错
VAR triggdata trigg1{25};
PROC idis()
reg1:=10;
FOR i FROM 1 TO 10 DO
TriggIO trigg1{2*i-1},(2*i-1)*reg1\Start\DOp:=do1,1;
TriggIO trigg1{2*i},2*i*reg1\Start\DOp:=do1,0;
ENDFOR
MoveL p100,v100,fine,MyTool\WObj:=wobj0;
TriggL p200,v100,trigg1,fine,MyTool\WObj:=wobj0;
ENDPROC
以上是小编为大家整理的关于ABB机器人的定长距离输出信号的相关内容希望可以对各位工控爱好者有所帮助并在当下疫情肆虐的情况下,祝愿大家身体健康,我们一起为中国加油,为武汉加油。
以上是小编为大家整理的关于ABB机器人的定长距离输出信号的相关内容希望可以对各位工控爱好者有所帮助并在当下疫情肆虐的情况下,祝愿大家身体健康,我们一起为中国加油,为武汉加油。