
 产品:66
产品:66

ABB机器人独立轴运动设置
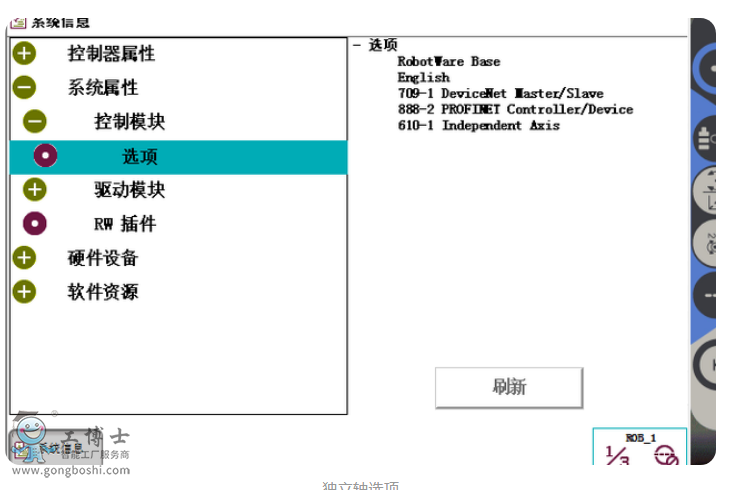
一、机器人需要安装选项610-1 Independent Axis:
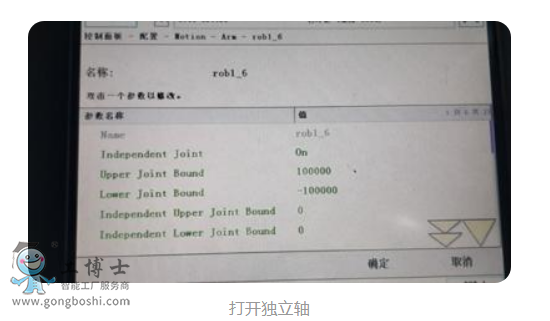
二、以轴6例设置独立轴,设置轴6的软限位。
1、在控制面板-配置-motion-arm-rob1-6下,设置轴6的软限位,并把Independent Joint选择为On
三、关于独立轴的编程指令
1、IndCMove
IndCMove(Independent Continuous Movement)用于将轴变更为独立模式,并以指定速度,开始轴的连续运动。
例:IndCMove Station_A,2,-30.5;
Station_A的轴2开始以30.5度/秒的速度,朝反方向运动。
2、IndDMove
IndDMove(Independent Delta Movement)用于将轴变更为独立模式,并将轴移动到特定距离处。
例:IndDMove Station_A,2,-30,20;
以20度/秒的速度,使Station_A的轴2朝负方向运动30度。
3、IndReset
IndReset(Independent Reset)用于将独立轴改变回正常模式。与此同时,可使旋转轴的测量系统运动许多转。
例:IndCMove Station_A,2,5;
MoveL *,v1000,fine,tool1;
IndCMove Station_A,2,0;
WaitUntil IndSpeed(Station_A,2\ZeroSpeed);
WaitTime 0.2
IndReset Station_A,2;
Station_A的轴2首先以独立模式运动,然后改变回正常模式。本轴将维持其位置。
注意:当执行指令IndReset时,不得使当前的独立轴和正常轴运动。这便是先前位置是停止点的原因,并以零速执行IndCMove指令。此外,暂停0.2秒,用以确保已实现正确的状态。
更多资讯:ABB机器人